Concept 1:
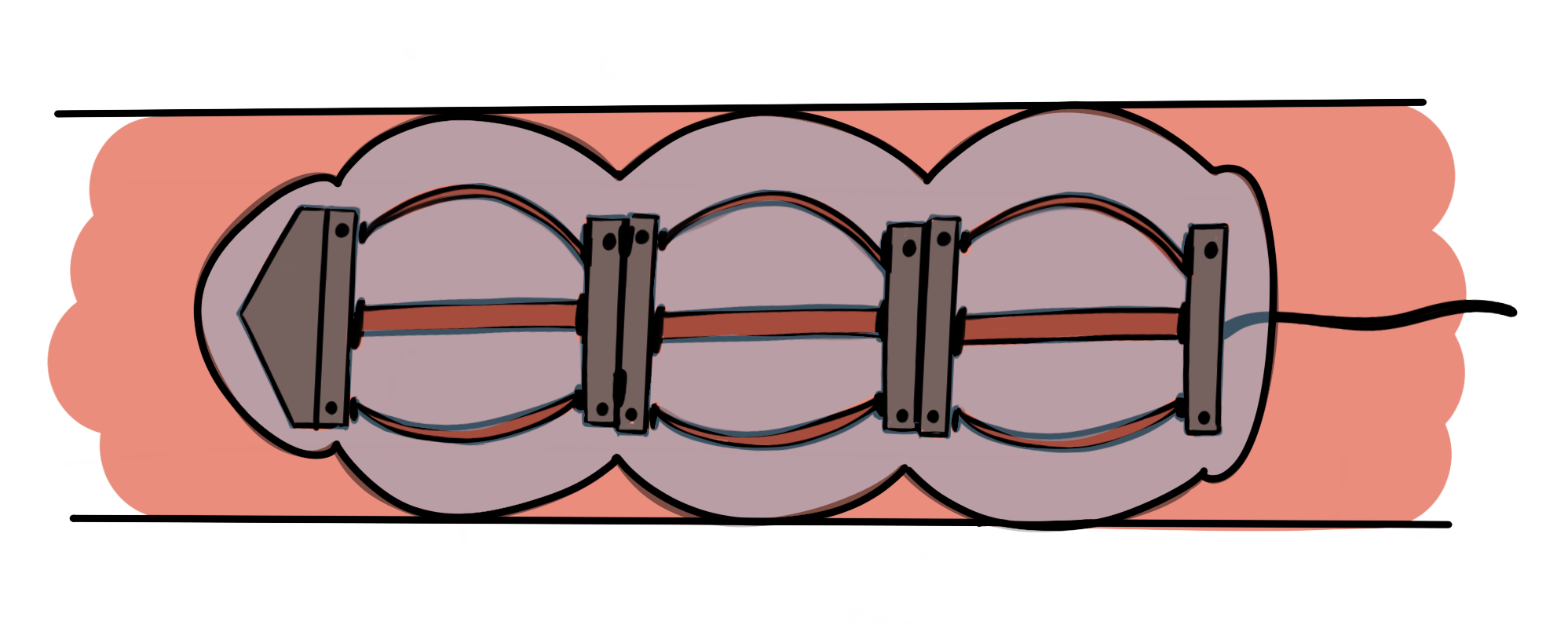
Concept 2:
Magnetic Actuator
-Optimizes speed
-Utilizes polarity reversing relay for efficient expansion
-Easily scaled to smaller size
Soft-Body Pipe Crawler
-Efficient movement
-Biomedically friendly
-Navigation Focused
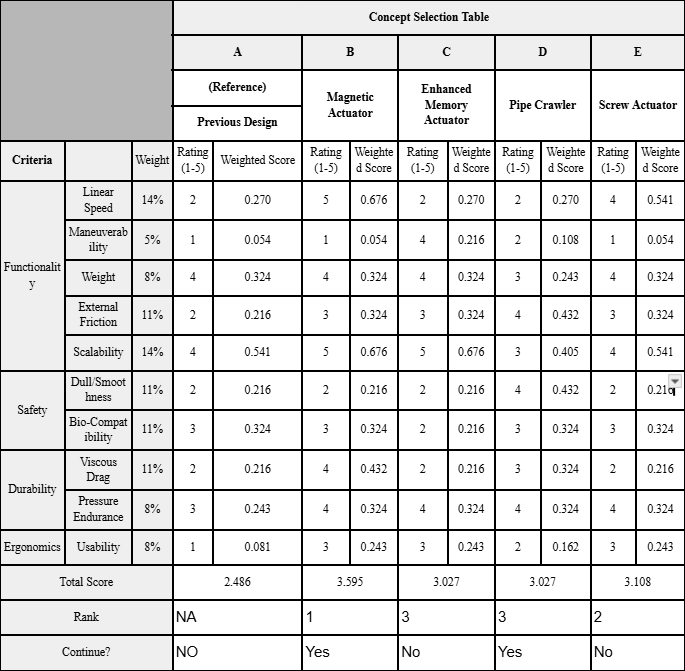
Concept Selection
The two concepts chosen were based on the following criteria
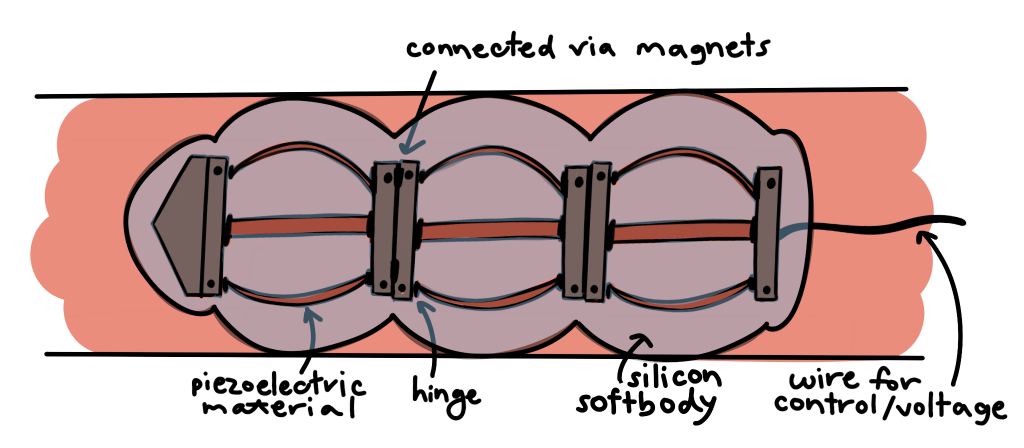
Concept Development
These concepts were taken and improved on by using the soft-body exterior of the pipe crawler, magnetic connections, and a new actuation method: piezoelectric.
Diagram of robot design:
Several issues arose in testing the piezoelectric material which caused for a second change to hydraulic actuation.
However, the change in actuation did not change the core of the robots ability to navigate the veins, this movement cycle is demonstrated below:
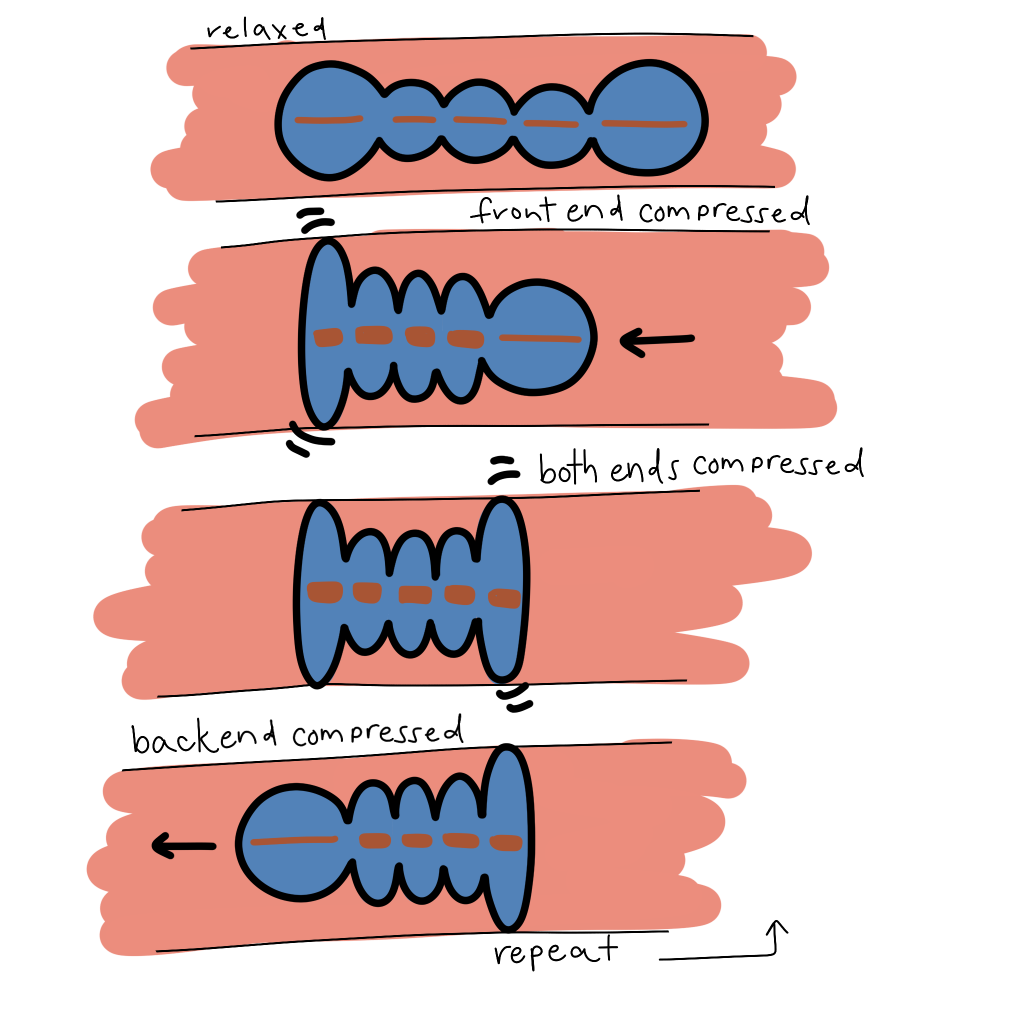
This new design has proven to be capable of the displacement necessary to move a significant distance, and much quicker than previous actuation methods. The soft-body exterior is silicon, which creates a shell and houses the piezoelectric material, as well as gripping the walls of the veins for forward movement.
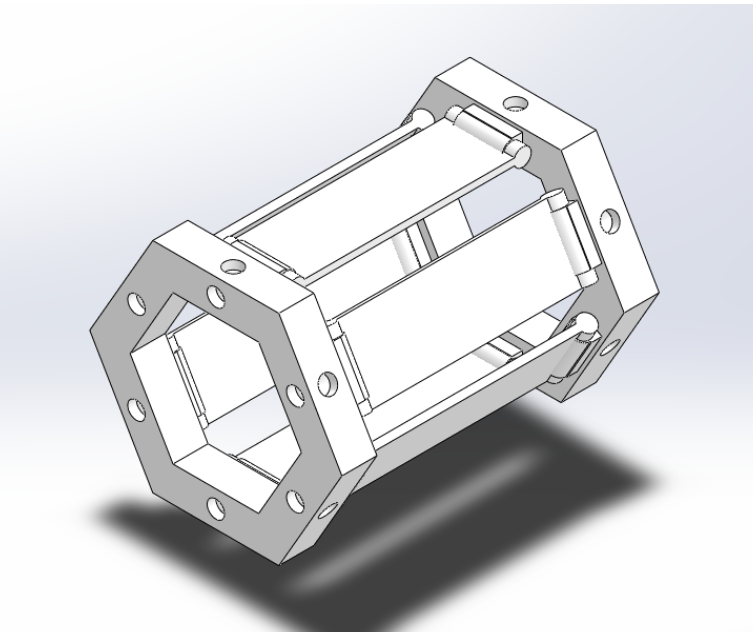
Robot Link Cad Visual:
Modular magnetic links, held by both faces and sides offer more applications for potential use. Edited to be more hexagonal, have more modularity.
Shown below is a singular module:
The modules are then assembled along with the hydraulic actuation and other components, this is linked below to a video of the Alpha Prototype:
https://drive.google.com/drive/folders/1HqLVb_-X8VoRkcSPf4gVKOPXDmpsB00t?usp=drive_link