Robot in the Bloodstream:
Force of Blood Incident on Robot:
Fblood = ⍴QΔv
Force Exerted on Robot
= 1.247 * 10-5 N (W/ 60 degree Conicular Head)
Known Variables:
Reynolds Number ~ 167 -laminar flow
Average Velocity ~ 150 – 350 mm/s -In larger arteries where surgery takes place
Density of blood, ⍴ = 1043 – 1060 Kg/m^3
Viscosity of Water ~ 0.001002 kg/ms
Viscosity of Blood ~ 0.00401 kg/ms
Drag Force of Blood on Robot:
Cf = 1.33 / (Re1/5)
Cf = 0.478
FD = ½*Cf*⍴*V2*As
Drag Force of Blood on Robot
= 5.61 * 10-6 N
Known Variables:
Flow Rate of Blood, V ~ 0.25 m/s
Coefficient of Friction = Cf
Density of Blood, ⍴ = 1052 kg/m3
Velocity of Blood, V = 0.0066 m/s
Cross-sectional Area, As = 0.000512 m2
Pressure on Arterial Wall/ Friction:
FNormal = Fexterted / μ
Fnormal = mass * gravity
Known Variables:
Frictional Coefficient, μ ~ 0.3
Mass of Robot = 0.01731 kg -Per link of robot without actuator weight
Pressure felt by Arterial Wall ~ 16,000 Pa
Other Analyses:
Equivalent Reynolds Number of Fluid at 10x Scale:
Reynolds Number Equation:
Re = ⍴VD/μ
Required Velocity of Simulator:
V = 0.008 m/s
Known Variables:
Water Density = 1,000 kg/m3
Average Water Velocity = ? m/s
Arterial Simulator Diameter = 0.025m
Dynamic Viscosity of water = 8.9 * 10-4 kg/ms
Force Incident on Robot Head as a Result of Simulated Flow:
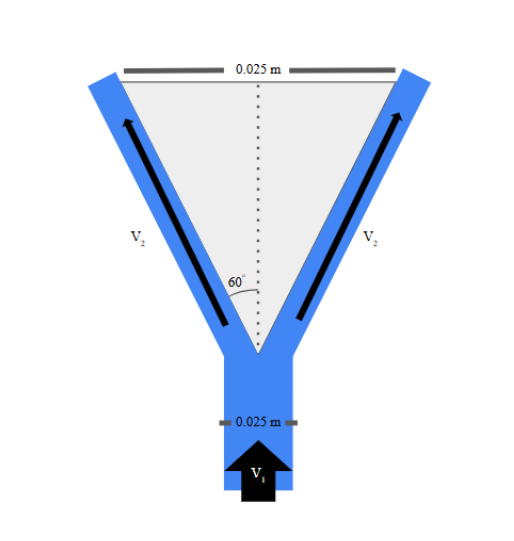
Governing Equation:
F = ⍴A1(-V1)2+⍴A2(V2)2 + ⍴A2(-V2)2
F = 3.527 * 10-4 N
Known Variables:
Flow Velocity, V1 = 0.008 m/s
V2 = 0.00693 m/s
Cross Section of Flow, A1 = 4.909*10-4 m2
Cross Section of Deflections, A2 = 0.004 m2
Density of Water, ⍴ = 1,000 kg/m3
Structure Material Analysis:
Governing Equations
εtot = εp * 1 / (1 + ψ)
ψ = Ests / Eptp = 225
εtot = 1.26*10-5
εtot = M / ZEt
Z = ⅙ Width * Thickness2 =8.33 *10-7
M = 4.73*10-4 N
Known Variables:
Structure material-
Thickness, ts = 20mm
Width = 0.0125 m
Length = 0.04m -Determined within Design
Young’s Modulus, Et ~0.045 Gpa
M = Applied Force
Magnetic Holding Force:
F = B2 * A / (2 * μ0)
F = (1.25)2 * ( ) / (2 * 4π * 10-7)
Known Variables:
Surface Area of Magnet = X m2
Flux Density, B = 1.2 Kg/Cs
Permeability, μ0 = 4π x 10-7 kg*m2/s2(C/s)2
Insight Gained
-robot must allow blood flow to continue
-have head of robot be a Conical Deflector
-if tether is present, addition friction will need to be considered
Potential Future Calculations
-Cycle Time
-Average distance needed to be traveled/ ideal time of surgery
-Friction force on exterior of robot link